360 Photo Robot
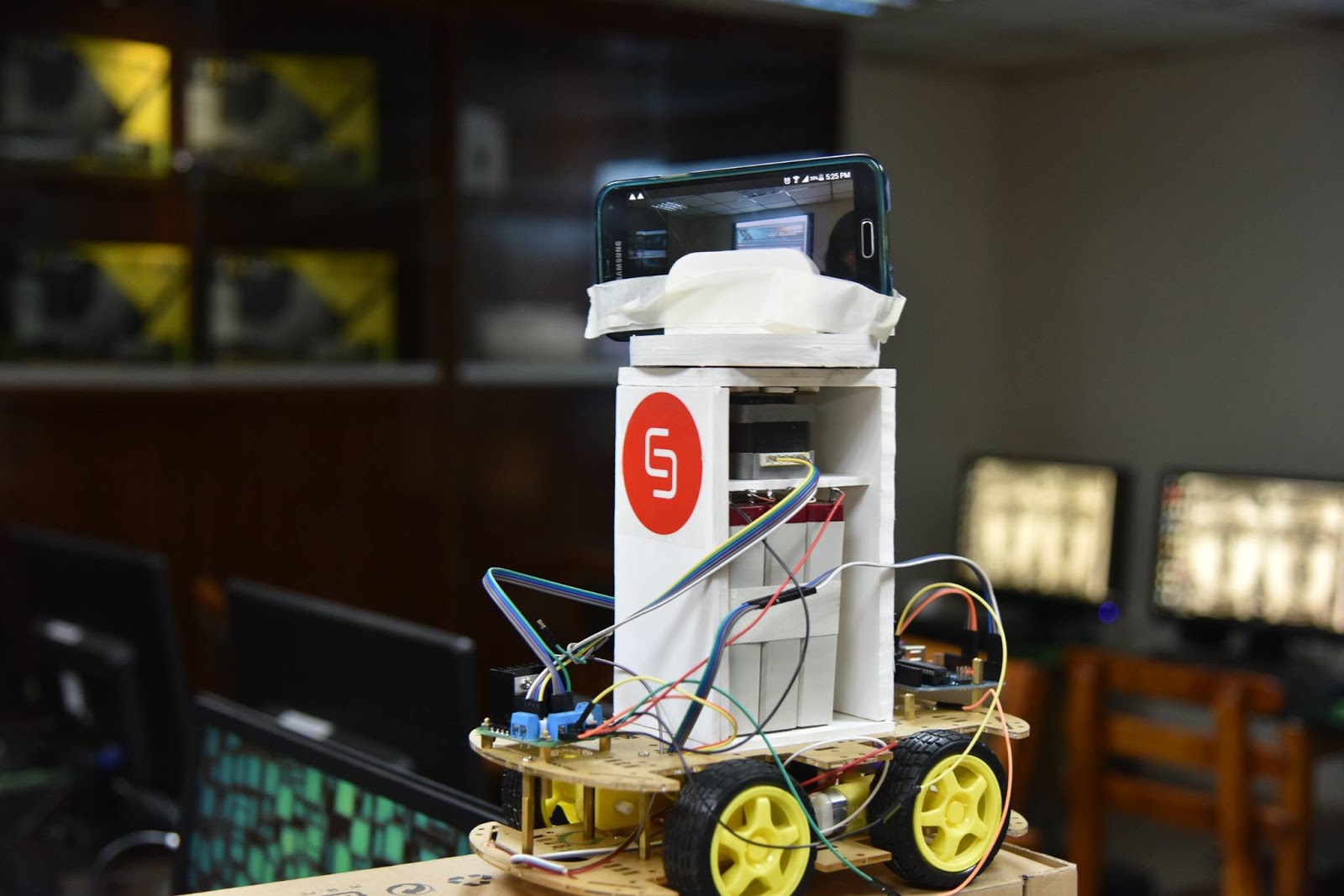
Objective: I made a remote controlled car that houses a rotating, cellphone stand. The objective behind this project was to enable a phone to take photos at 360 degrees and then make a 3D map of the 360 degree view using the photos, similar to a Google Street View. This task is usually done tediously, using a tripod and manual photography at every angle. As a result, this project facilitates this task of photography.
Approach: The top part of the robot can rotate at any given angle and stop for a few seconds for the phone to take the picture. The rotating mechanism of the top part uses a stepper motor to control the camera rotation. 4 DC motors were used to drive the entire robot as a car. The entire bot was controlled by an Arduino UNO connected with an HC08 Bluetooth module and an L293DN motor driver, three 4.2 volts lead-acid batteries which were connected in series to power the robot. The position of the robot is controlled by a mobile app. Unfortunately, the 3D mapping part did not work properly due to the camera stabilization and straight movement issue.